基于51单片机的智能避障小车的设计
来源:56doc.com 资料编号:5D19101 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D19101
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于51单片机的智能避障小车的设计(课题说明书,开题报告,中期检查表,论文8800字)
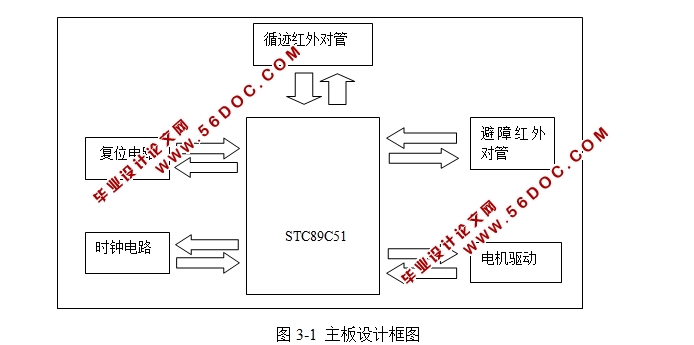
摘 要 在此次智能避障小车的设计中,为了能实现实时的监测实验状况,接受输入信号,采用了多种模块传感器。例如,寻迹功能,可以用光电传感器来实现,而避障功能可以用红外对管来实现,用ST89C51来作主控制芯片,为了更好地实现小车的驱动能力,采用的L298N芯片,至于速度方面,用由单片机输出的PWM波来控制。为了实现转弯功能,在小车左右安装两个直流电机,通过电机的运转速度实现分别控制。通过光电感应,实现小车自动识别路线,在小车碰上障碍物时能较有效的控制其转弯角度及寻迹行驶。
关键词 智能小车; 51单片机; L298N; 红外避障; 寻迹行驶
Design of Intelligent Obstacle Avoidance Car Based on 51 Single Chip Microcomputer
Abstract In the design of the intelligent obstacle avoidance car, in order to achieve real-time monitoring of the experimental situation and accept the input signal, a variety of module sensors are used. For example, the tracing function can be realized by photoelectric sensor, while the obstacle avoidance function can be realized by infrared tube. ST89C51 is used as the main control chip. In order to better realize the driving ability of the car, L298N chip is used. As for the speed, the PWM wave output by the single chip computer is used to control. In order to realize the turning function, two DC motors are installed on the left and right of the car, and the speed of the motor is controlled separately. By means of photoelectric induction, the car can automatically identify the route, and can effectively control the turning angle and track driving when the car encounters obstacles.
Keywords Smart car; 51 MCU; L298N; Infrared obstacle avoidance; Track driving
目 录
摘要及关键词 1
1 绪论 1
1.1 智能小车的背景 1
1.2 智能小车的意义和作用 2
2 方案设计与论证 2
2.1 实验设想 2
2.2 主控系统 3
2.3 电机模块 4
2.4 循迹避障模块 5
2.5 机械系统 7
2.6 电源模块 7
3 硬件设计 7
3.1 最小系统 7
3.2 驱动电路 10
3.3 信号检测模块 11
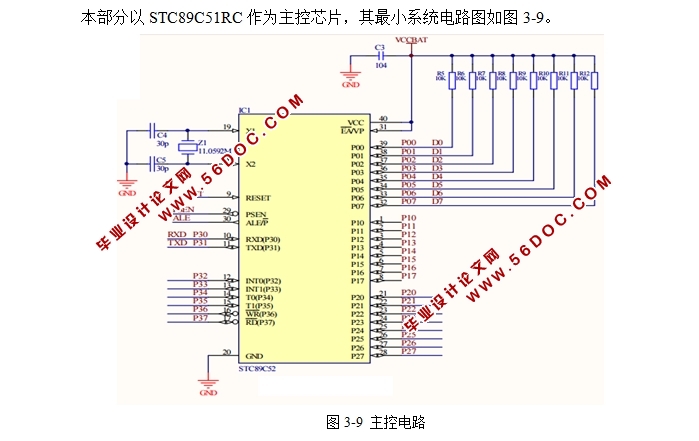
3.4 主控电路 12
3.5 电源电路 12
4 软件设计 13
4.1 软件调试平台 13
4.2 主程序框图 14
4.3 电机驱动模块 15
4.4 避障-寻迹模块 17
4.5 PWM电机调速 18
5 调试结果分析 20
6 不同介质对避障能力的影响 21
7 结论 21
参考文献 22
致谢 23
|
