基于单片机的三关节机器人控制系统的设计(任务书,开题报告,论文17000字)
摘 要
随着科技水平的进步,机器人开始在很多领域取代人类做着重复、繁重、枯燥的工作。为了使其更方便更让人放心地服务人类,必须去研究机械手臂内层控制系统,包括机械结构设计、运动算法设计和安全稳定性考核。本文所研究的课题是设计并且搭建三关节机器人控制系统,让该控制系统平滑稳定地完成一系列指定任务。
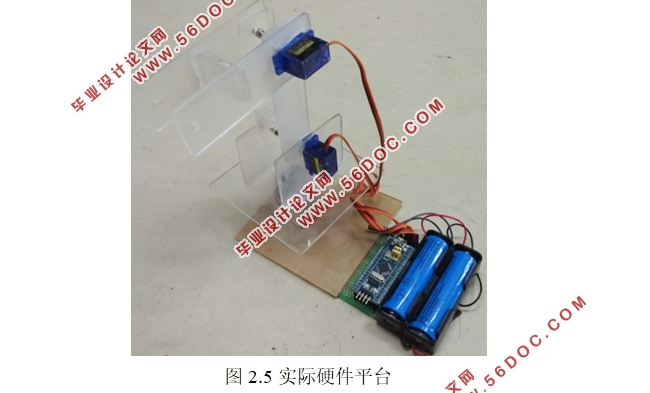
本文设计并搭建了该系统控制部分的核心电路和机械手臂的实物,在keil4平台上编写了核心控制器stm32的主要程序,实现了上位机与系统的异步串行通信功能,产生脉冲波形功能,限位信号、原点信号和驱动报警信号的功能和三关节直线及两关节弧线插补运动的功能。本文在笛卡尔坐标系中建立了三关节机械手臂的数学模型,分析了该机械手臂正运动学控制和逆运动学问题的求解过程。利用MATLAB软件进行了直线插补算法和弧线插补算法的验证,并使用MFC制作了该系统的上位机。最后,对系统进行了软硬件联合调试,测试了主要的功能。
本文使用了模块化的编程思想,加快了系统软件的开发过程。通过设置两个机械臂的臂长相等减少了大量的反三角函数运算,从而减轻了控制器的负担。同时,通过细化笛卡尔坐标系的坐标间隔,优化了机械手臂末端的定点误差。
关键词:单片机;三关节机器人;matlab;逆运动学分析;插值算法
Abstract
With the improvement of science and technology, the robot begins to replace people to do the heavy, repetitive and boring works in a growing number of areas. In order to bring human beings more convenience and safety, the inner control system of the robot arms must be researched including the design of mechanical structure, the design of kinematics algorithm and the safety and stability assessment. A three joint robot arm control system which could execute a series of tasks is designed in this article.
Firstly, the core circuit of the robot arm control system and the objects are designed and built. The software of this system is mainly finished in the keil4 platform, which realizes the asynchronous serial communication between the system and the PC, generates a series of pulse waveform, sets up the limit signal ,origin signal and the alarm signal, completes the function of straight and arc interpolation. The mathematical model of three joint robot arm in the Cartesian coordinate system is established, and the solving process of mechanical arm kinematics control and inverse kinematics problem is analyzed. The validation of the linear interpolation algorithm and arc interpolation algorithm problem is proved by using MATLAB software. Then, the host computer software is designed by MFC, which can communicate with the microcontroller successfully. Finally, the software and hardware of the system are combined to debug, and the main function of the system is tested.
The thought of modularization is applied in this system, which accelerates the process of the development. Because the length of the two arms is designed to be equal, a large number of inverse trigonometric functions are reduced to alleviate the burden of the microcontroller. At the same time, the fixed point error of the end of the robot arm is optimized by thinning the coordinate space of the Cartesian coordinate system.
Keywords: microcontroller;three joint robot;matlab;inverse kinematics analysis;interpolation algorithm


目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 国内外研究现状 1
1.2 发展前景 1
第2章 系统硬件设计 2
2.1 机械结构的设计 2
2.2 结构材料的选择 2
2.3 核心电路的设计 3
2.3.1 主控芯片的选择 3
2.3.2 驱动电机的选择 3
2.3.3 驱动报警电路的设计 4
2.3.4 供电部分的设计 4
2.4 硬件原理图设计 5
2.5 硬件平台效果图 6
第3章 系统软件设计 7
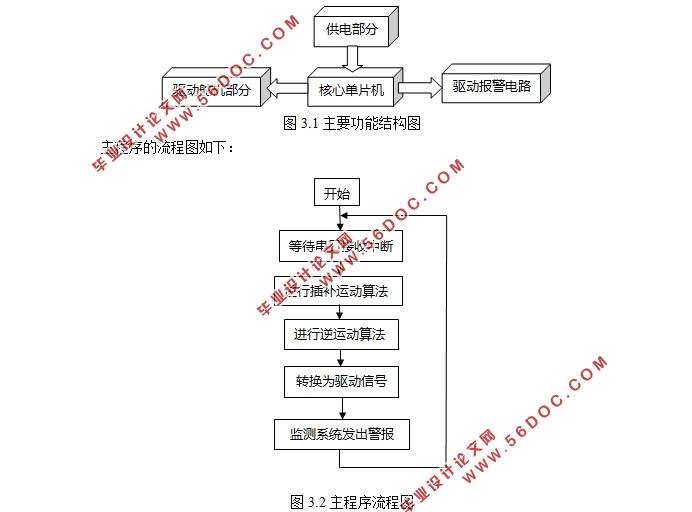
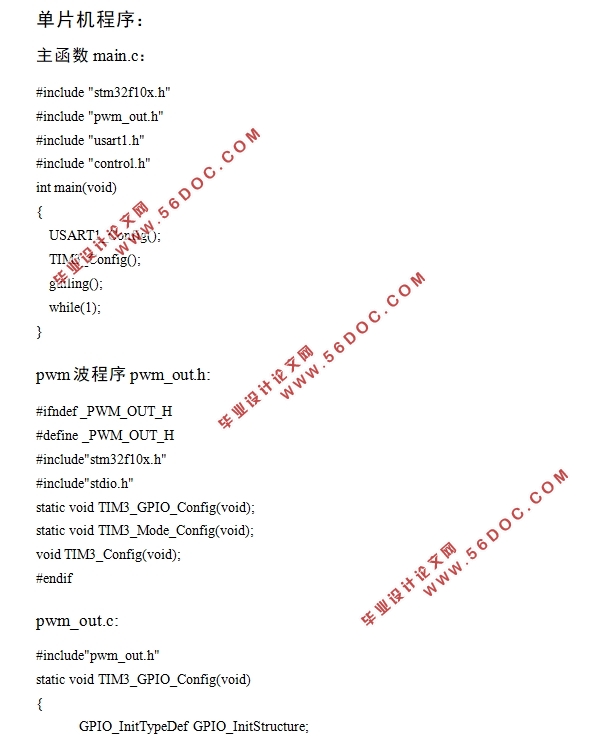
3.1 单片机主程序设计 7
3.2 舵机驱动部分的实现 8
3.3 通信部分的实现 9
3.4 相关控制信号的实现 11
3.5 运动学分析 11
3.5.1 几何模型的建立 12
3.5.2 正运动学分析 13
3.5.3 逆运动学分析 13
3.6 轨迹规划与插值算法 14
3.6.1 轨迹规划 14
3.6.2 插值算法 15
3.6.3 插补运动的分析 15
3.6.4 插补运动的仿真 19
第4章 上位机的编写 21
4.1 用户界面的搭建 21
4.2 通信功能实现 21
4.3 其他上位机 23
第5章 联合调试 24
5.1 单关节运动调试 24
5.2 插补运动调试 24
5.3 运动过程的优化 25
第6章 结论 27
参考文献 28
附录 29
致谢 44
|
