基于DGPS定位数据的自驾驶小车控制系统设计(含电路图,原理图,程序)(选题审批表,任务书,开题报告,中期检查表,毕业论文13000字)
摘 要:全球定位系统GPS的发展非常迅速,美国政府为了限制其他国家可能把GPS技术用于军事目的,因此对GPS定位精度进行了限制。虽然2000年5月1号起美国政府已经宣布取消SA政策,但是GPS单点定位精度还是比较低,应用范围比较小,为了使GPS技术应用的更广泛,世界各国发展了各自的差分GPS技术。农业机械自动导航技术是现代农业机械装备的重要支持技术之一。实现农业机械的智能化导航,可以有效减少驾驶员的劳动强度,提高农田作业质量,具有重要的理论研究意义和实际应用价值。
关键词:DGPS;U盘数据读取;小车自动控制电路
Design of Auto Drive Car Control System Based on Orientation data of DGPS
Abstract: GPS-global positioning system develops rapidly. In order to restrict other countries which may use GPS technology for military purposes, the U.S. government limits the accuracy of GPS positioning. Although the U.S. government has announced the cancellation of SA policies on May 1th, 2000, single point positioning accuracy of GPS is still relatively low, and the range of applications is relatively small. To wider application of GPS technology, many countries develop their own differential GPS technology. Automatic navigation of agricultural machinery and technology is one of important modern agricultural machineries and equipments which supports technologies. Intelligent navigation of agricultural machinery, can effectively reduce the driver’s labor intensity and improve the quality of field operations, and has important theoretical significance and practical value.
Keywords : DGPS; U disk data reading; car control circuit
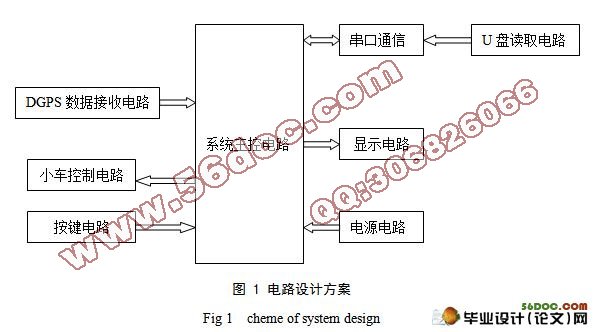
设计原理
基于差分GPS定位数据的自驾驶小车[8],是由单片机读取U盘中原始小车行进路线的DGPS数据,与接收小车实际DGPS坐标数据进行对比,得出小车纠正误差的行进路线,控制小车纠正误差。
单片机的选择
本文选用51系列单片机,主控电路选用ACT8951单片机,小车执行模块选用STC12C5A60S2。
AT89C51是美国ATMEL公司生产的低功耗,高性能CMOS8位单片机,片内含4K的可编程的Flash只读程序存储器,器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准8051指令系统及引脚。它集Flash程序存储器既可在线编程(ISP)也可用传统方法进行编程及通用8位微处理器于单片机芯片中,ATMEL公司的功能强大,低价位AT89S51单片机可为您提供许多高性价比的应用场合,可灵活应用于各种控制领域。
STC12C5A60S2/AD/PWM系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S),针对电机控制,强干扰场合。
目 录
摘 要 1
关键词 1
1 前言 2
2 总体方案设计 3
2.1设计原理 3
2.2设计方案的确定 3
2.3 元器件的选择 4
2.3.1 单片机的选择 4
2.3.2 通讯芯片的选择 5
2.3.3 液晶屏的选择 6
2.3.4 定位试验基准站的选择 7
3 电路模块解析 8
3.1 电源模块 8
3.1.1 直流稳压电源的组成 8
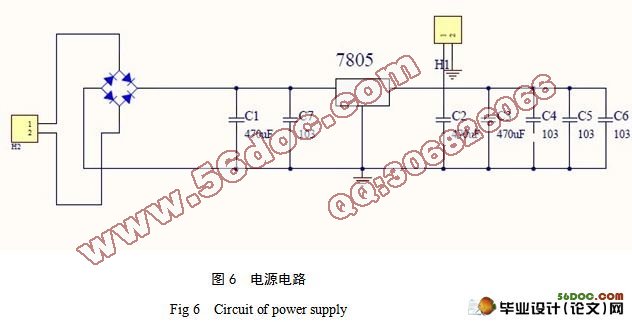
3.1.2 整流滤波电路 8
3.1.3 稳压电路的选择 10
3.2 U盘数据读取模块 11
3.3 键盘控制电路 12
3.4 串口通讯模块 12
3.4.1 波特率的选择 12
3.4.2 通讯协议的使用 13
3.4.3 硬件连接 13
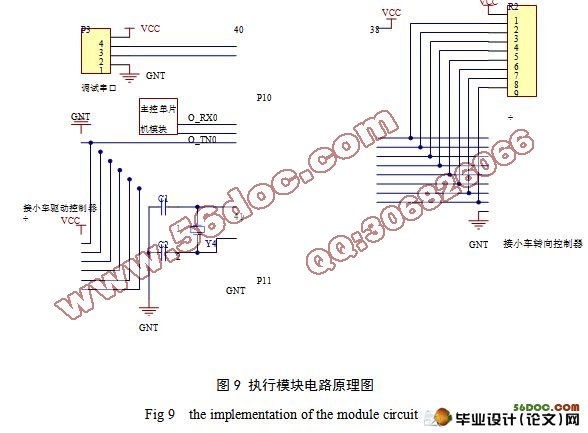
3.5 小车执行模块 17
3.6 显示模块 17
3.6.1 ST7920与MCU的连接 18
3.6.2 接口说明 18
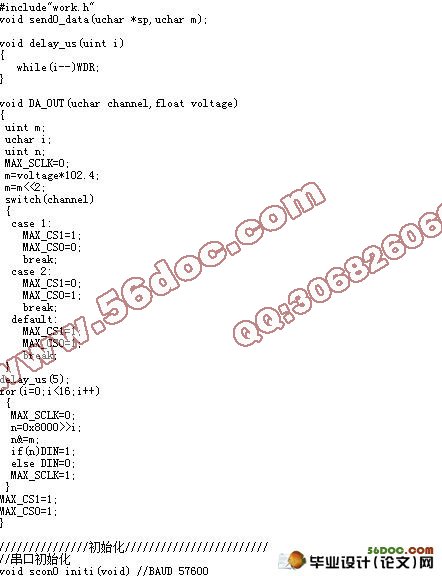
4 软件设计 19
5 DGPS定位原理与试验 23
5.1 DGPS定位原理 23
5.2 DGPS定位试验 24
6 结论 25
参考文献 25
致谢 26
附录 26
附录
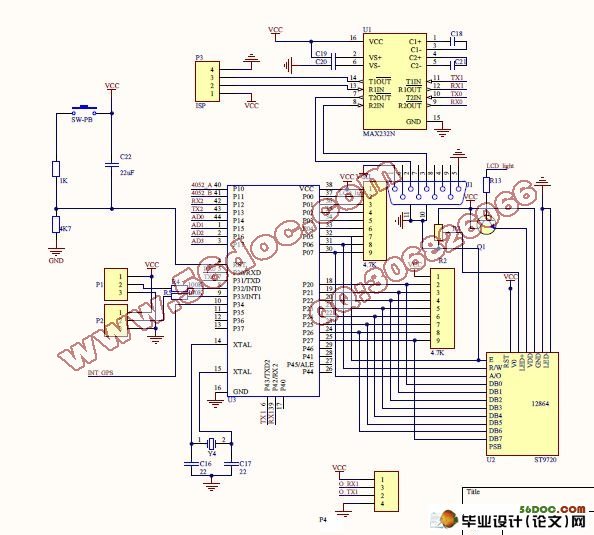
附录1:系统原理图
附录2:电源电路
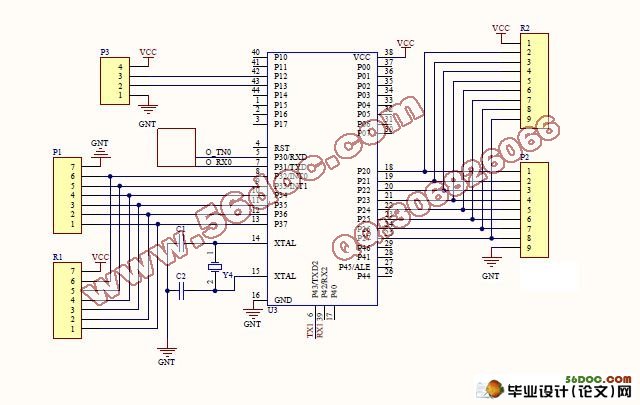
附录3:小车执行模块
附录4:PCB图
附录5:程序
|