微型自主行驶车辆底盘设计(含CREO三维图)
来源:56doc.com 资料编号:5D25329 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25329
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
微型自主行驶车辆底盘设计(含CREO三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书12000字,CREO三维图)
摘 要
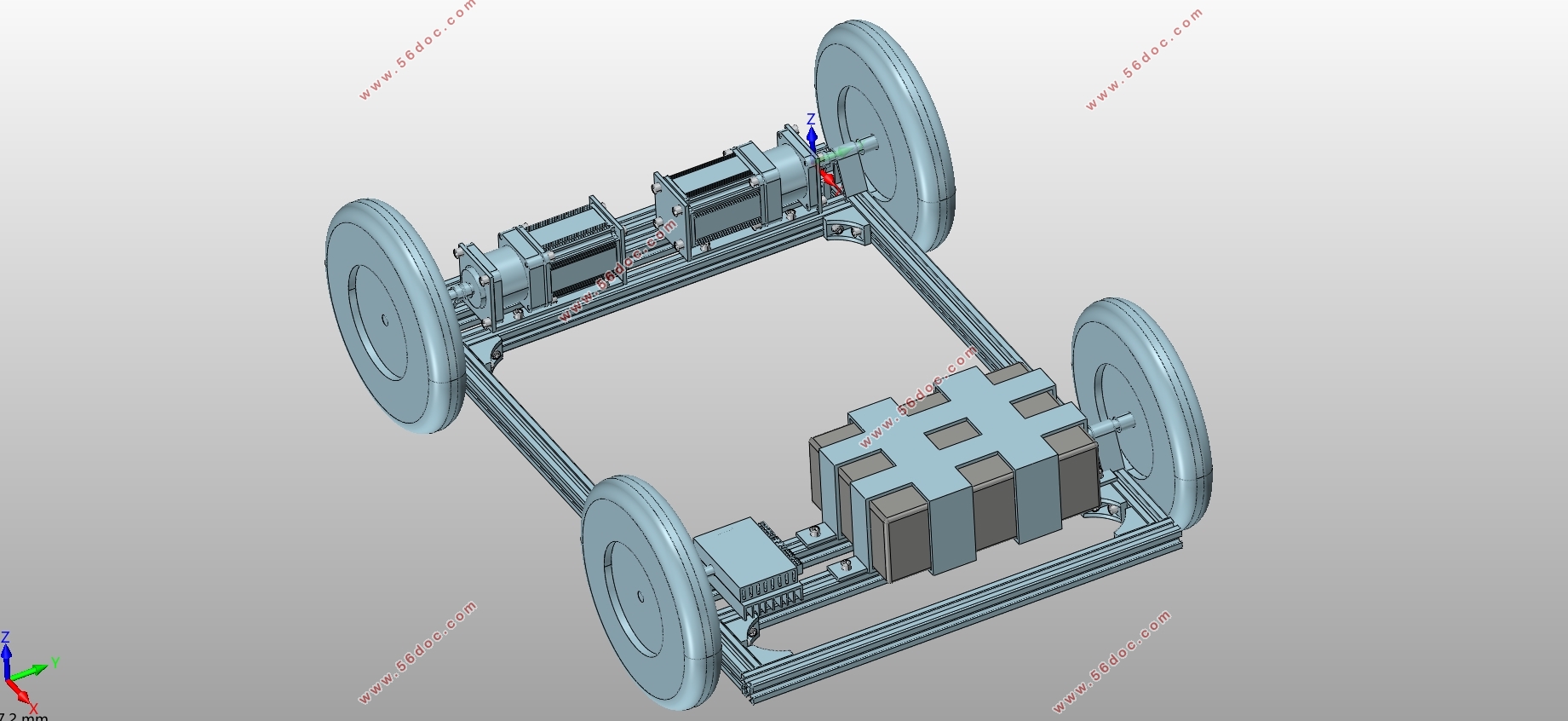
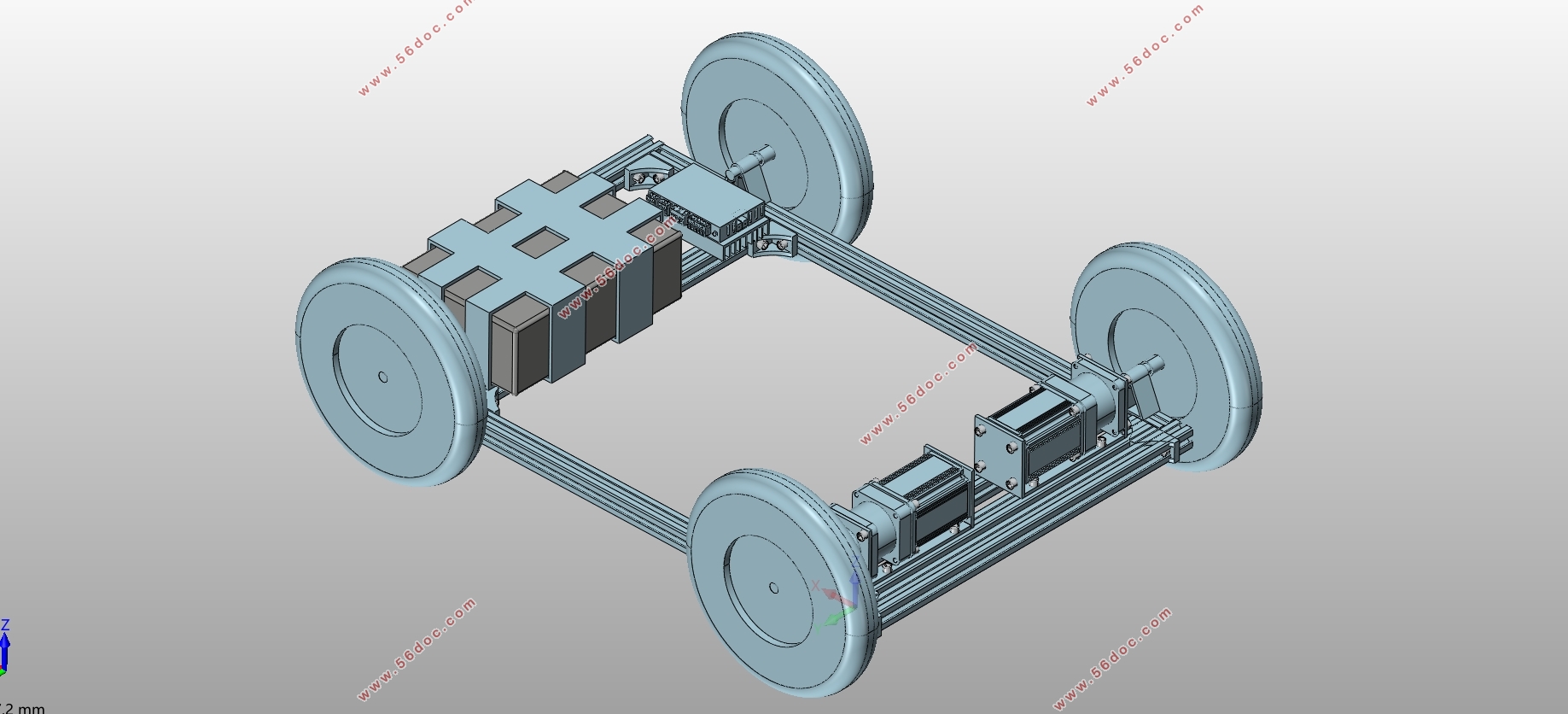
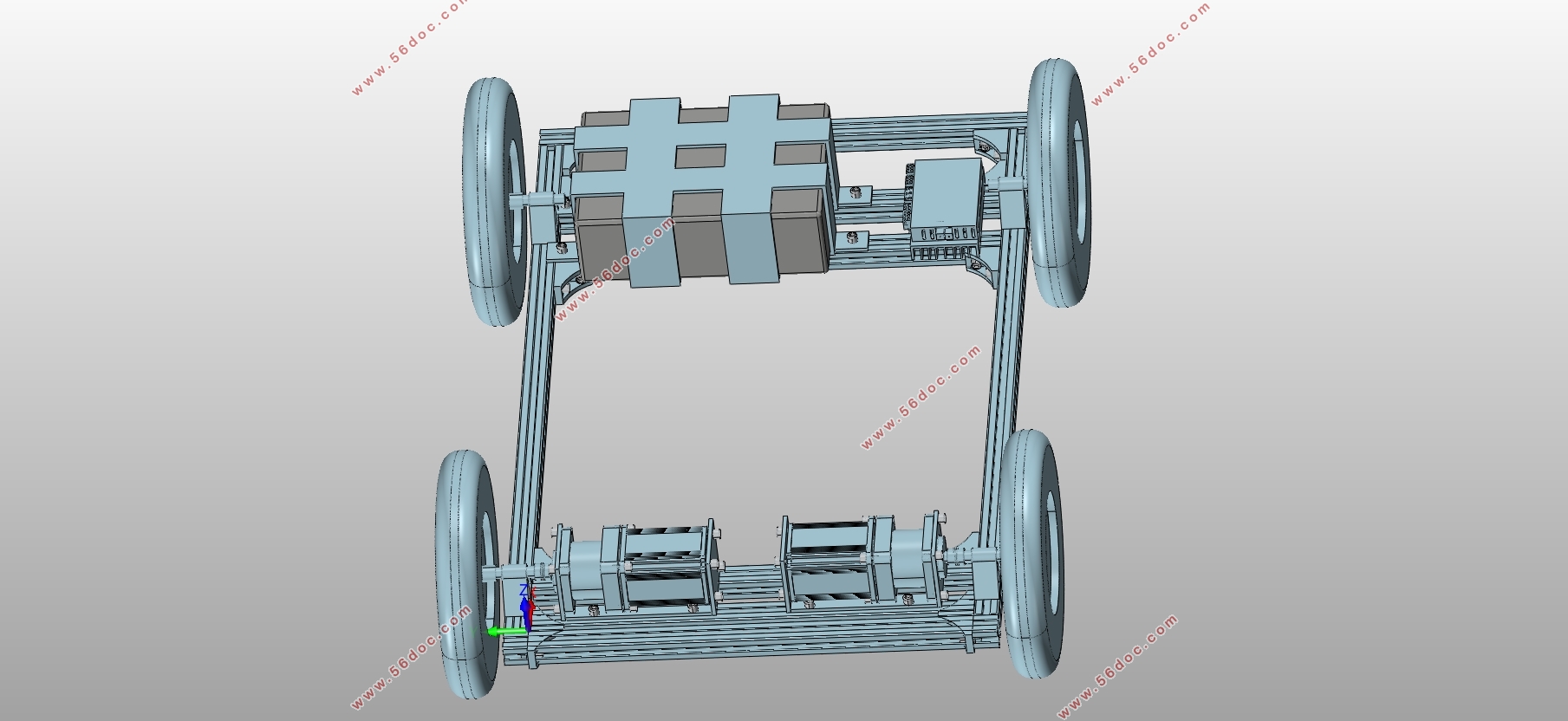
近年来无人驾驶技术得到巨大发展,尤其是在感知、定位、决策和控制领域。目前,大多数科研机构和企业多是采用改装车的方法进行无人驾驶实验,对应用于无人驾驶的底盘的研究还未深入。本文利用Creo对以选择的智能车底盘各零部件建模,并完成各零部件的拼装,得到一个可视化效果。运用Creo对智能小车的三维模型进行仿真和调试,完善智能小车的模型;并根据模型进行小车底盘拼装,并编写电机控制程序,实现智能小车底盘的前进、转向和制动。
通过本文的研究,能够清晰地认识Creo的建模和仿真的方法。该方法为智能车底盘制作提供了良好的平台,对于验证智能车快速实现智能车底盘的搭建具有重要的意义。
关键词:智能车底盘;Creo;建模;电机控制
Abstract
In recent years, unmanned driving technology has been greatly developed,especially in the areas of perception, positioning, decision making and control. At present the test of unmanned vehicle was carried out by means of reloading vehicle for most research institutions and enterprises, but the corresponding research on unmanned chassis has not been carried out in depth. This paper uses Creo to model the parts and components of the selected intelligent vehicle chassis, and completing the assembly of each part and get a visual effect. Besidesthe 3d model of intelligent car is simulated and debugged by using Creo to perfect the model of intelligent car and the car chassis is assembled and the motor control program is written to realize the advance, steering and braking of the intelligent car chassis according to the model.
Through the research of this paper, the modeling and simulation methods of Creo can be clearly understood. This method provides a good platform for the production of intelligent vehicle chassis, and is of great significance to verify the rapid construction of intelligent vehicle chassis.
Key Words: Chassis of Intelligent Vehicle;Creo; Modeling; Motor control
小车的参数
参数 数值
整车质量 35kg
轮胎半径 15cm
车速 20(km/h)
迎风面积 0.12m^2
目 录
第1章 绪论 1
1.1 研究的背景与意义 1
1.2 研究现状及发展趋势 1
1.2.1转向系统方面 1
1.2.2动力系统方面 1
1.2.3主避障系统方面 2
1.2.4底盘方面 2
1.3 本课题主要的研究内容 2
1.3.1 主要研究步骤 2
1.3.2 主要章节概括 2
第2章 智能小车原理及设计要求 4
2.1智能小车的控制概述 4
2.2 智能小车综述 5
2.2.1 行驶系统 5
2.2.2 能源系统 5
2.2.3 电池 6
2.2.4 电机的选择 6
2.2.5 避震系统 8
2.2.6转向系统 8
2.3本章小结 8
第3章 智能小车CREO模型的构建与仿真 10
3.1 CREO软件介绍 10
3.2 智能小车Creo模型的建立 10
3.2.1 智能小车各零件模型的建立 10
3.2.2 智能小车模型的装配 20
3.3 智能小车CREO模型的仿真 23
3.4 本章小结 26
第4章 智能小车电机驱动的程序控制 28
4.1 CodeWarrior软件介绍 28
4.2 控制程序的编写 28
4.3 控制程序的检验 31
4.4 本章小结 32
第5章 结论与展望 33
5.1 工作结论 33
5.2 展望 33
参考文献 34
致 谢 35
|