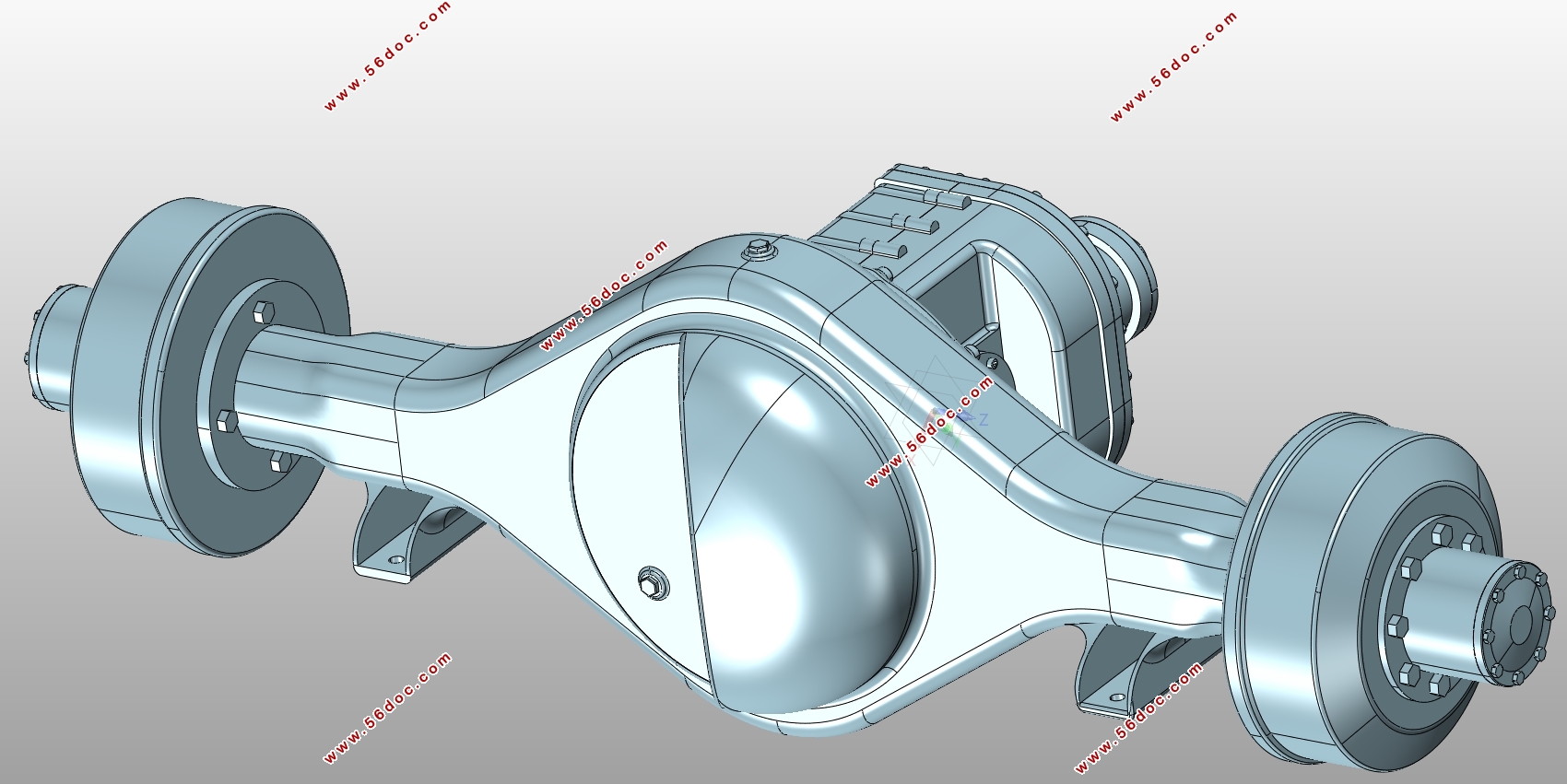
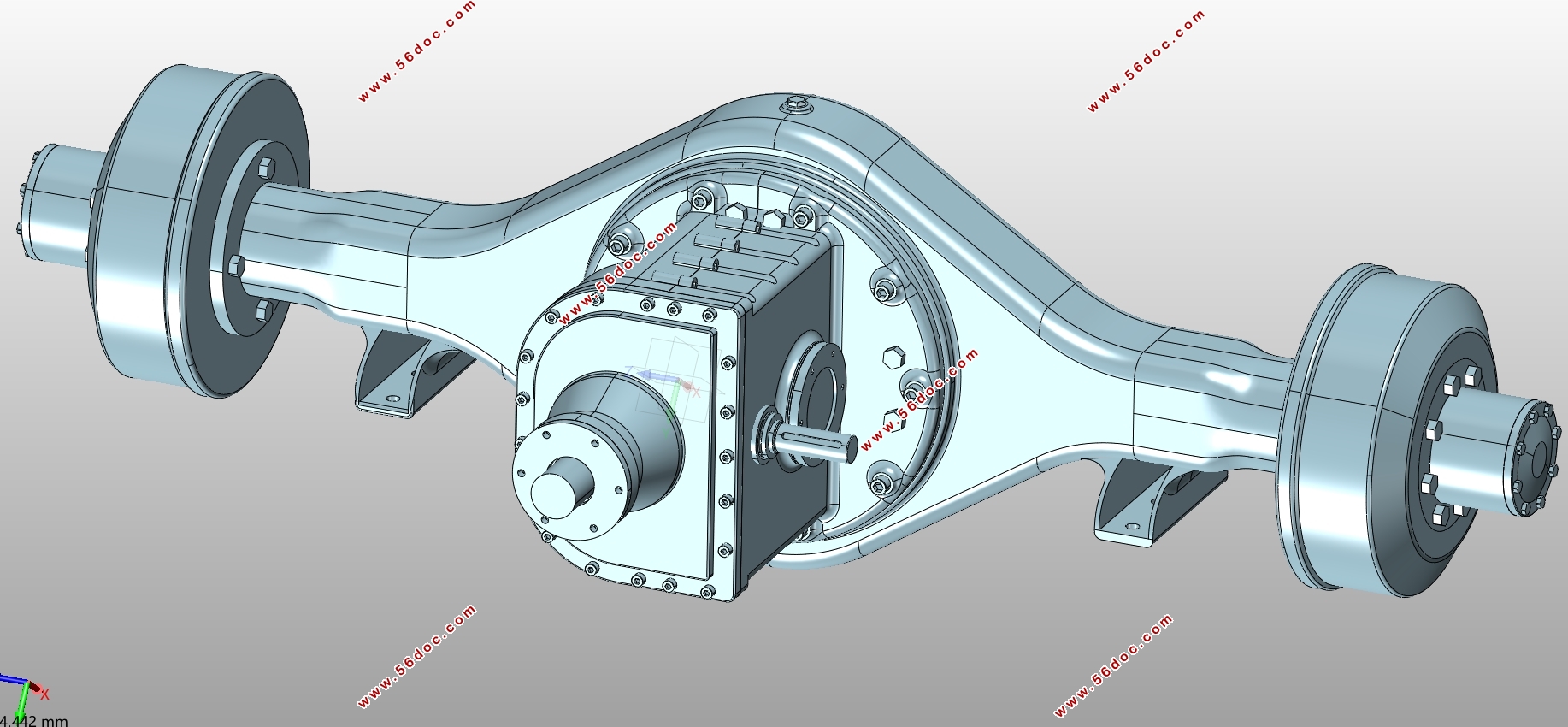
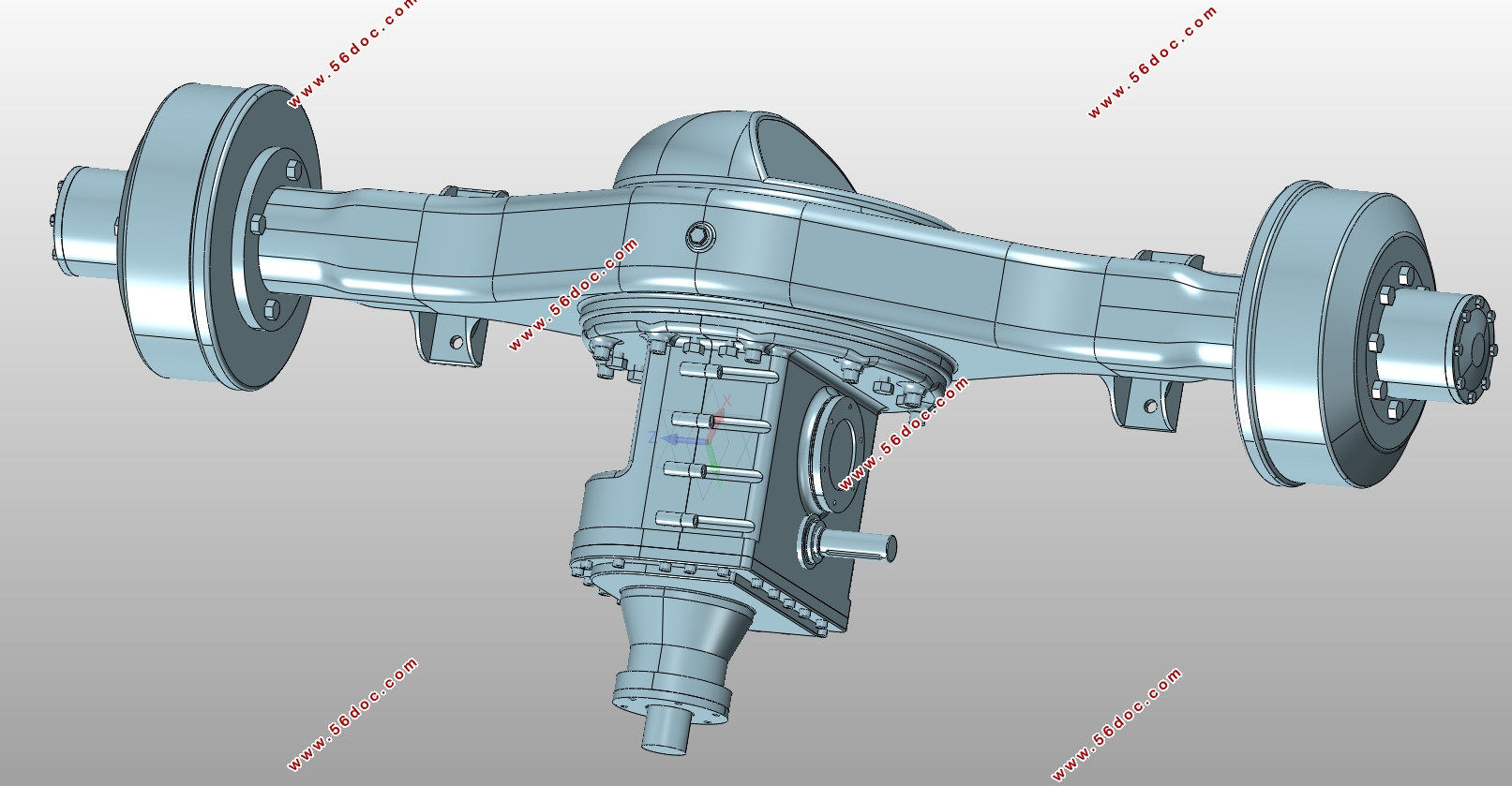
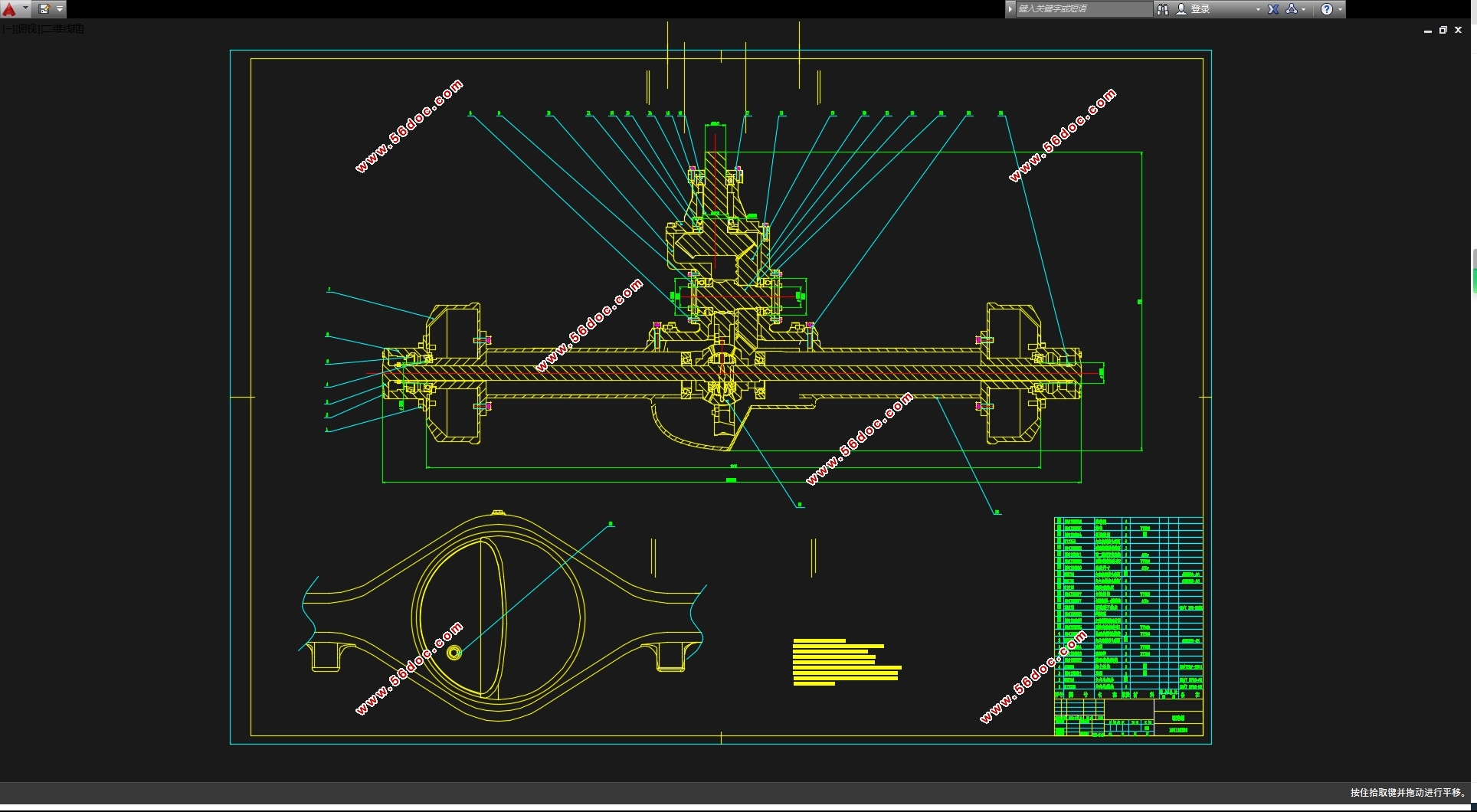
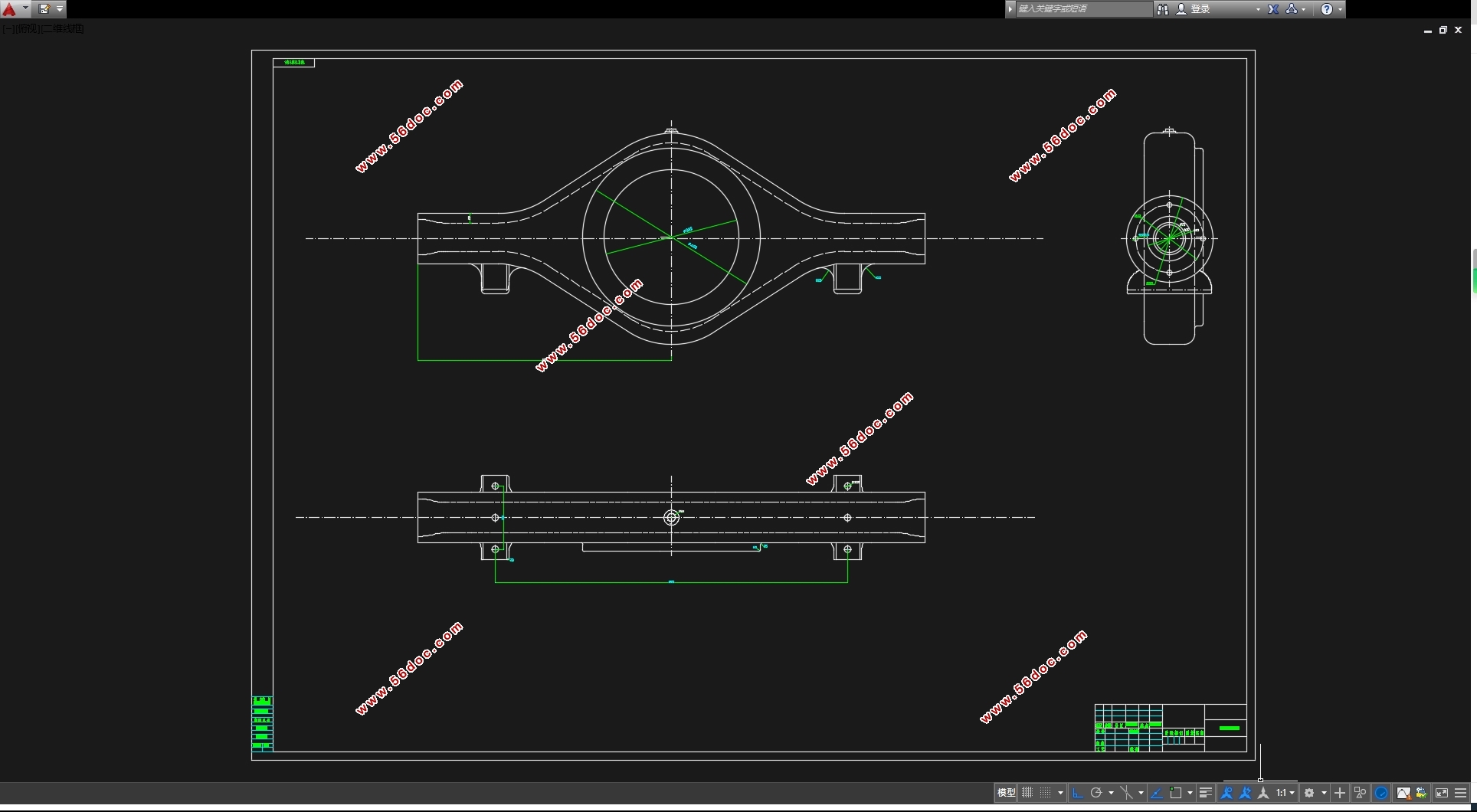
无人驾驶智能垃圾转运车驱动系统设计(含CAD图,STEP三维图) 来源:56doc.com 资料编号:5D28106 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D28106 资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 无人驾驶智能垃圾转运车驱动系统设计(含CAD图,STEP三维图)(任务书,开题报告,文献摘要,论文说明书17000字,CAD图5张,STEP三维图) 纯电动驱动桥驱动系统设计 驱动桥在纯电动汽车中担负着着降低转速提高转矩的作用,使左右车轮拥有适合行驶的恰当转矩。汽车在运行过程中,地面与汽车之间会形成许多力和力矩,例如垂直力。本章通过对纯电动汽车驱动桥各零部件进行简单概述,研究各部分的物理关系,在这个基础上,讨论在汽车前进过程中驱动桥所受干扰作用情况。结合相关的参数标准要求对设计进行校验。 驱动桥方案 桥壳、主减速器、差速器和半轴等是纯电动驱动桥的重要组成,车桥的结构形式一般有断开式和非断开式之分。断开式驱动桥的显著特点是没有毗邻双侧驱动车轮的桥壳,减速器、差速器等结构都为簧上部分,这一结构会产生汽车的平顺性充分提高的效果,而且两侧驱动车轮可以各自相对车身摆动而不会产生彼此干预。非断开式驱动桥是在一根空心梁式的桥壳中装入减速器、差速器等。此时,驱动桥总成为簧下质量,汽车平顺性也会有所下滑。 由于结构简易、便宜等优点,非断开式车桥广受追捧。根据本设计纯电动垃圾转运车要求,社区道路平坦,平顺性一般良好,考虑到设计结构及成本以及对舒适性的低要求,故选择非断开式驱动桥,采用一根刚性空心整体车桥,将主减速器、差速器、半轴置于车桥内。驱动电机与后桥直接相连。 纯电动智能垃圾转运车基本参数如下 名称 参数 名称 参数 高度 1257mm 最高车速 8km/h 长度 2190mm 满载质量 1500kg 宽度 1218mm 轮胎直径 400mm 轴距 1625mm 行驶速度 5km/h 整备质量 993kg 目录 摘要 I Abstact II 目录 III 第1章 绪论 1 1.1 课题来源及研究的目的和意义 1 1.2 国内外研究现状 1 1.2.1国外研究现状 1 1.2.2国内研究现状 2 1.3 本章小结 3 第2章 纯电动驱动桥驱动系统设计 4 2.1纯电动驱动桥方案设计 4 2.1.1驱动桥方案 4 2.2驱动电机的选择 5 2.2.1 电机基本参数确定 5 2.2.2 电机选型 6 2.3 纯电动驱动桥主要部件设计 6 2.3.1主减速器设计 7 2.3.2差速器设计 10 2.3.3半轴设计 12 2.4 纯电动驱动桥受力分析与校核 13 2.4.1主减速器啮合齿轮副受力分析 13 2.4.2差速器啮合齿轮副受力分析 15 2.4.3半轴的设计计算 15 2.4.4 桥壳有限元分析 16 2.5 本章小结 19 第3章 驱动桥壳受力分析纯电动驱动桥后悬架设计 20 3.1 悬架方案选择 20 3.2 悬架主要参数的确定 20 3.3 弹性元件的计算 21 3.3.1钢板弹簧的设计 21 3.4本章小结 23 第4章 纯电动驱动桥电控系统设计及实验 24 4.1电控系统构架设计 24 4.2硬件选型 25 4.3控制策略 27 4.4 实验过程及结果 28 4.5 本章小结 28 第5章 总结与展望 29 参考文献 30 致谢 31