基于PLC的机器人自动化控制系统的设计与应用(任务书,开题报告,论文10000字)
摘 要
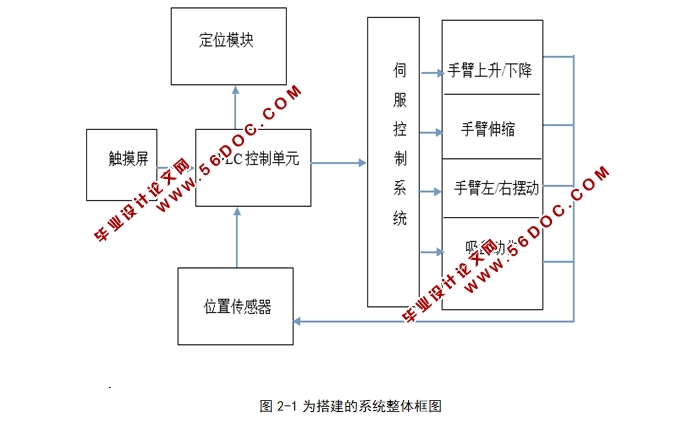
随着科技的发展,PLC得到了极大的推广与应用。本文设计了基于PLC的搬运机器人运动控制系统设计方案,旨在通过学习,掌握台达PLC、定位模块,以及台达ASDA伺服驱动器的基本使用方法。搭建的双轴运动控制平台由威纶触摸屏、台达DVP-32ES可编程控制器、定位单元和台达伺服系统等硬件部分及其相应的软件部分组成,能够满足该设计的基本要求。机械臂的运动轴分别由一个伺服电机驱动,利用限位开关定位的控制,机械臂的任务是完成上升/下降,左行/右行,抓紧/放松的动作。然后利用人机界面搭建模拟仿真平台。本文将首先介绍实验台各部分的硬件的选择与构成,然后再说明设计中的软件编程等部分。
关键词:台达PLC;威纶触摸屏;伺服系统;人机界面
Abstract
With the development of science and technology, PLC has been a great promotion and application.This article is designed based on handling robot motion control system design of PLC,Aims to study and master the basic use of Delta PLC, positioning module, as well as Delta ASDA servo drives.The dual-axis motion control platform built by the Wei Lun touch screen,Delta DVP-32ESprogrammable controller,Integral part of the hard ware and the corresponding software part position in gun it and servo systems Delta,Able to meet the basic requirements of the design, Manipulator motion axes driven by a servomotor,The use of limit switches to control the positioning of,The task is to complete the robotic arm up / down,left row /right line, seize/ relaxation actions,Then use to build a simulation platform for HMI.This article will first introduce selection and structure of each part of the experiment station hardware, and then illustrate the design of software programming and other parts
Key words: Delta PLC;Servo System ;Touch Screen
该设计基于tta的DVP32 ES型PLC,tda / asda伺服驱动器和tda dvp1pu模块,这些模块可移动机械臂以实现提升,降低,旋转,压实和松动等基本功能。实现控制。我已经学习了一些关于某些运动控制的运动控制模块的控制方向的初步知识,并希望它能够将这个声明带到每个人的学习中。研究内容包括以下几个方面。
1)Willis触摸屏使用;
2)tta系列PLC编程和使用;
3)运动控制模块的编程使用;
4)伺服驱动器的测量方法;
基本功能是
1)可以通过Billon Touch控制PLC的操作。
2)可以执行PLC和定位模块之间的通信。
3)可以实现dvp32es与伺服驱动器之间的通信。
4)控制一些简单的动作。
目 录
摘 要 I
Abstract II
1 绪论 1
1.1 课题的背景和意义 1
1.2 课题国内外发展现状 2
1.3 课题主要研究内容与基本实现的目标 3
2 硬件部分选型与设计 5
2.1 威纶触摸屏 5
2.2 可编程控制器(PLC) 8
2.3 定位单元 12
2.4 伺服驱动器 17
2.5 本章小结 22
3 软件设计部分 23
3.1软件设计的总体框架 23
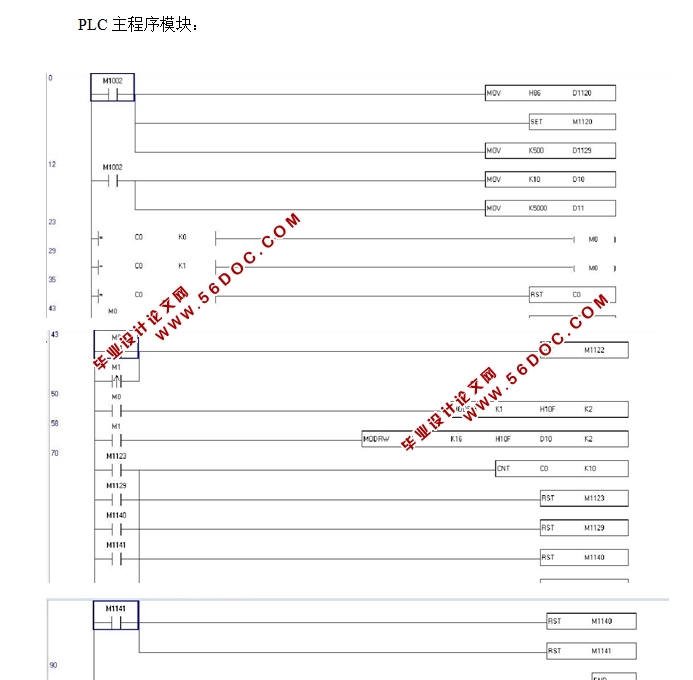
3.2 PLC主程序的设计 23
3.3定位程序的设计 24
3.3.1定位模块编程与使用 24
3.4定位单元与PLC之间的通信 29
3.5本章小结 31
4人机界面的设计 32
4.1人机界面 32
4.2构建人机界面 32
5 结论 35
参考文献 36
致 谢 37
附录A 实验程序 38
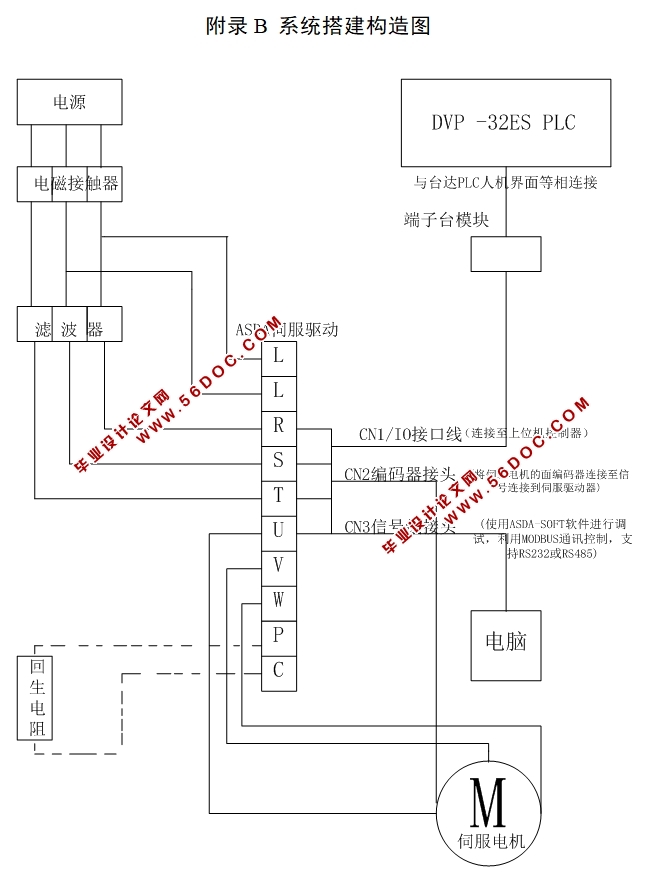
附录B 系统搭建构造图 40
|
