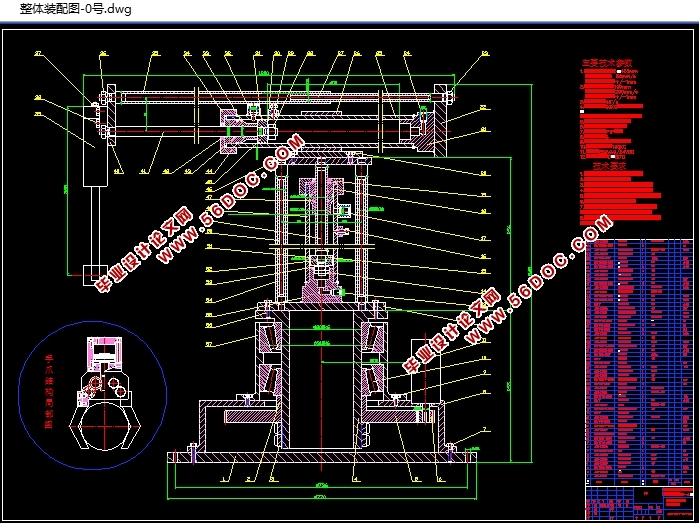
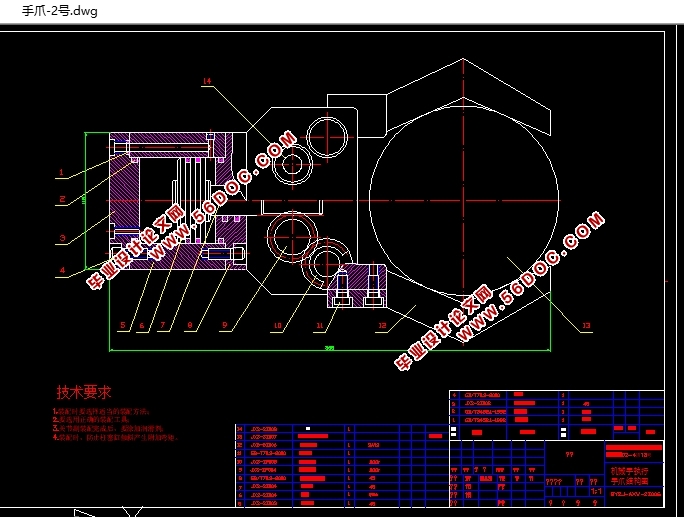
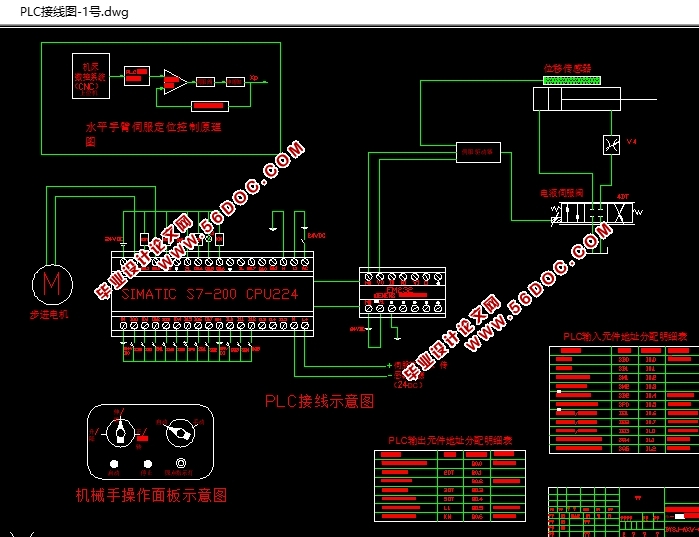
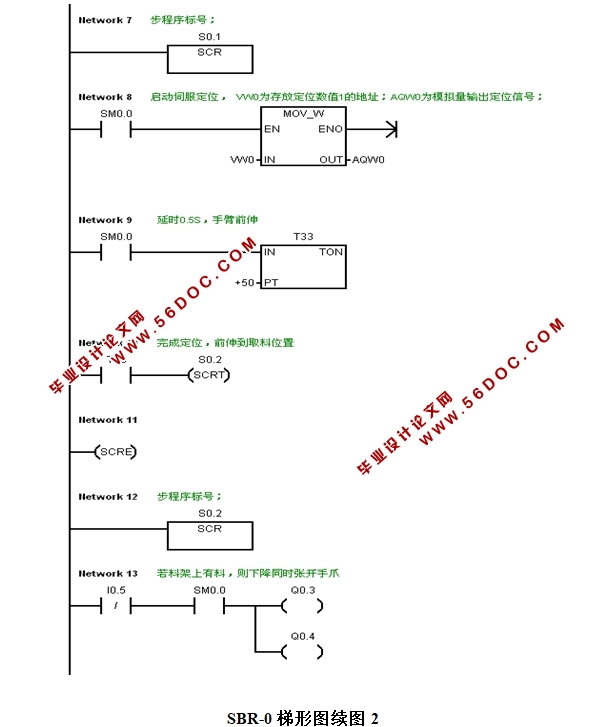
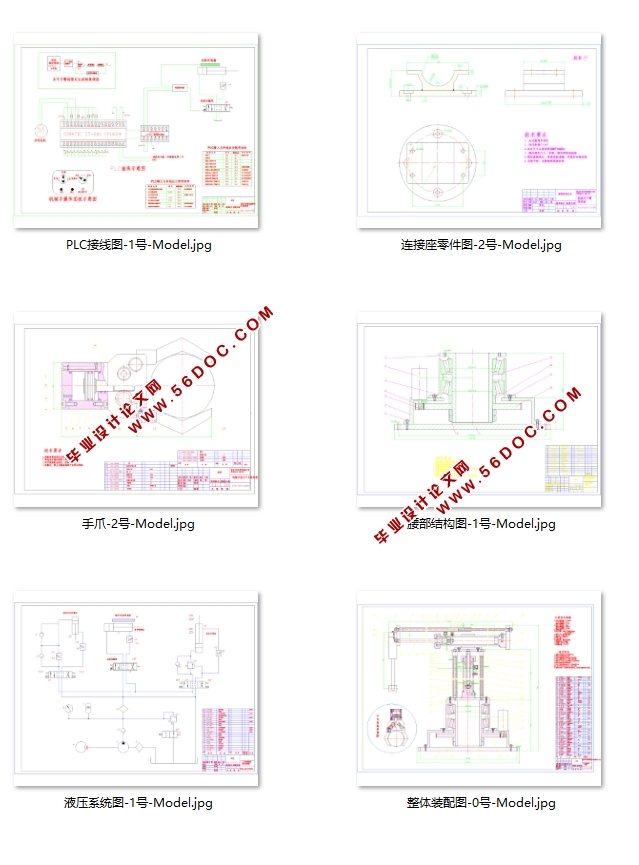
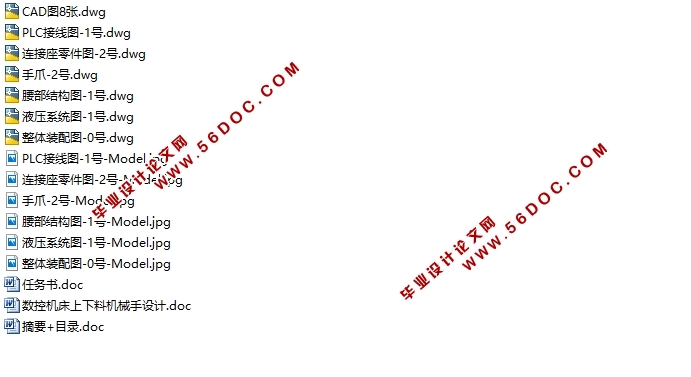
Ъ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЩшМЦ(PLC)(КЌCADСуМўЭМзАХфЭМ) РДдДЃК56doc.com зЪСЯБрКХЃК5D19508 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D19508 зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ ЮввЊЯТдиИУзЪдД зЪСЯНщЩм Ъ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЩшМЦ(PLC)(КЌCADСуМўЭМзАХфЭМ)(ШЮЮёЪщ,ТлЮФЫЕУїЪщ20000зж,CADЭМжН7еХ) еЊ вЊ ЭЈЙ§ЖдЛњаЕЩшМЦжЦдьМАЦфздЖЏЛЏзЈвЕДѓбЇБОПЦЫФФъЕФЫљбЇжЊЪЖНјааећКЯЃЌЖдЙЄвЕЛњаЕЪжИїВПЗжЛњаЕНсЙЙКЭЙІФмЕФТлЪіКЭЗжЮіЃЌЩшМЦСЫвЛжждВжљзјБъаЮЪНЕФЪ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЁЃжиЕуеыЖдЛњаЕЪжЕФбќзљЁЂЪжБлЁЂЪжзІЕШИїВПЗжЛњаЕНсЙЙвдМАЛњаЕЪжПижЦЯЕЭГНјааСЫЯъЯИЕФЩшМЦЁЃОпЬхНјааСЫЛњаЕЪжЕФзмЬхЩшМЦЃЌбќзљНсЙЙЕФЩшМЦЃЌЛњаЕЪжЪжБлНсЙЙЕФЩшМЦЃЌЛњаЕЪжЭѓВПЕФНсЙЙЩшМЦЃЌФЉЖЫжДааЦїЃЈЪжзІЃЉЕФНсЙЙЩшМЦЃЌЛњаЕЪжЕФЛњаЕДЋЖЏЛњЙЙЕФЩшМЦЃЌЛњаЕЪжЧ§ЖЏЯЕЭГЕФЩшМЦЁЃЭЌЪБЖдвКбЙЯЕЭГКЭПижЦЯЕЭГНјааСЫРэТлЗжЮіКЭМЦЫуЁЃЛљгкPLCЖдЛњаЕЪжЕФПижЦЯЕЭГНјааСЫЩюШыЯИжТЕФЩшМЦЃЌЭЈЙ§ЖдЛњаЕЪжзївЕЕФЙЄвеЙ§ГЬКЭПижЦвЊЧѓЕФЗжЮіЃЌЩшМЦСЫПижЦЯЕЭГЕФгВМўЕчТЗЃЌЭЌЪББржЦСЫЛњаЕЪжЕФПижЦГЬађЁЃЩшМЦДяЕНСЫЩшМЦЕФдЄЦкФПБъЁЃ ЙиМќДЪЃКЛњаЕЪжЃЛPLCЃЛвКбЙЫХЗўЖЈЮЛЃЛЕчвКЯЕЭГ ИУЗНАИЪЧЪ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЩшМЦЃЌЩшМЦвЊЧѓАсдЫЕФМгЙЄЙЄМўЕФжЪСПДя30KGЃЌЧвГЄЖШДя500MMЃЌЭЌЪБПМТЧЕНЪ§ПиЛњДВВМОжЕФОпЬхаЮЪНМАЖдЛњаЕЪжЕФОпЬхвЊЧѓЃЌПМТЧдкТњзуЯЕЭГЙЄвевЊЧѓЕФЧАЬсЯТЃЌОЁСПМђЛЏНсЙЙЃЌвдМѕаЁГЩБОЁЂЬсИпПЩППЖШЁЃИУЛњаЕЪждкЙЄзїжаашвЊ3жждЫЖЏ,ЦфжаЪжБлЕФЩьЫѕКЭСЂжљЩ§НЕЮЊСНИіжБЯпдЫЖЏ,СэвЛИіЮЊЪжБлЕФЛизЊдЫЖЏ,злКЯПМТЧЃЌЛњаЕЪжздгЩЖШЪ§ФПШЁЮЊ3ЃЌзјБъаЮЪНбЁдёдВжљзјБъаЮЪНЃЌМДвЛИізЊЖЏздгЩЖШСНИівЦЖЏздгЩЖШЃЌЦфЬиЕуЪЧ:НсЙЙБШНЯМђЕЅ,ЪжБлдЫЖЏЗЖЮЇДѓ,ЧвгаНЯИпЕФЖЈЮЛзМШЗЖШЁЃ ЛњаЕЪжЙЄвеЙ§ГЬгыПижЦвЊЧѓЃКЛњаЕЪжЕФЖЏзїгаЫЎЦНЪжБлЕФЩьЫѕЃЌДЙжБЪжБлЕФЩ§НЕЃЌжДааЪжзІЕФМгНєгыЫЩПЊвдМАбќВПЕФа§зЊЁЃЦфжаЃЌДЙжБЩ§НЕКЭЫЎЦНЩьЫѕгавКбЙЪЕЯжЧ§ЖЏЁЃЖјвКбЙИзгжгЩЯргІЕФЕчДХЗЇПижЦЁЃЦфжаЃЌЩ§НЕЗжБ№гЩЫЋЯпШІЕФСНЮЛЕчДХЗЇПижЦЃЌР§ШчЃЌЕБЯТНЕЕчДХЗЇЭЈЕчЪБЃЌЛњаЕЪжЯТНЕЃЛЕБЯТНЕЕчДХЗЇЖЯЕчЪБЃЌЛњаЕЪжЯТНЕЭЃжЙЁЃжЛгаЕБЩЯЩ§ЕчДХЗЇЭЈЕчЪБЃЌЛњаЕЪжВХЩЯЩ§ЃЛЖјЕБЩЯЩ§ЕчДХЗЇЖЯЕчЪБЃЌЛњаЕЪжЩЯЩ§ЭЃжЙЁЃЖјЫЎЦНЗНЯђЕФЩьЫѕжївЊгЩЕчвКЫХЗўЗЇЁЂЫХЗўЧ§ЖЏЦїЁЂИагІЪНЮЛвЦДЋИаЦїЙЙГЩЕФЛиТЗНјааЕїНкПижЦЁЃЖјжДааЪжзІЕФМгНєгыЗХЫЩЃЌЭЈЙ§жљШћИзгыГнТжРДЪЕЯжЁЃжљШћИзгЩЕЅЯпШІЕФЕчДХЗЇЃЈМаНєЕчДХЗЇЃЉРДПижЦЃЌЕБЯпШІВЛЭЈЕчЪБЃЌжљШћИзВЛЙЄзїЃЌЕБЯпШІЭЈЕчЪБЃЌжљШћИзЙЄзїГхГЬЃЌЪжзІеХПЊЃЌжљШћИзЙЄзїЛиГЬЃЌЪжзІБеКЯЁЃ ЕБЛњаЕЪжа§зЊЕНЛњДВЩЯЗНЪБВЂзМБИЯТНЕНјааЩЯЯТСЯЙЄзїЪБЃЌЮЊСЫШЗБЃАВШЋЃЌБиаыдкЛњДВЭЃжЙЙЄзїВЂЗЂГіЩЯЯТСЯУќСюЪБЃЌВХдЪаэЛњаЕЪжЯТНЕНјаазївЕЁЃЭЌЪБЃЌДгЙЄМўСЯМмЩЯзЅШЁЙЄМўЪБЃЌвВвЊЯШХаЖЯСЯМмЩЯгаЮоЙЄМўПЩШЁЁЃ ФП ТМ еЊвЊ Ђё Abstract Ђђ Ек1еТ аїТл 1 1.1 бЁЬтБГОА 1 1.2 ЩшМЦФПЕФ 1 1.3 ЙњФкЭтбаОПЯжзДКЭЧїЪЦ 2 1.4 ЩшМЦддђ 3 Ек2еТ ЩшМЦЗНАИЕФТлжЄ 3 2.1ЛњаЕЪжЕФзмЬхЩшМЦ 3 2.1.1 ЛњаЕЪжзмЬхНсЙЙЕФРраЭ 3 2.1.2 ЩшМЦОпЬхВЩгУЗНАИ 4 2.2ЛњаЕЪжбќзљНсЙЙЕФЩшМЦ 5 2.2.1 ЛњаЕЪжбќзљНсЙЙЕФЩшМЦвЊЧѓ 5 2.2.2 ЩшМЦОпЬхВЩгУЗНАИ 6 2.3ЛњаЕЪжЪжБлНсЙЙЕФЩшМЦ 7 2.3.1 ЛњаЕЪжЪжБлЕФЩшМЦвЊЧѓ 7 2.3.2 ЩшМЦОпЬхВЩгУЗНАИ 8 2.4ЙЄвЕЛњЦїШЫЭѓВПЕФНсЙЙ 9 2.4.1ЛњЦїШЫЪжЭѓНсЙЙЕФЩшМЦвЊЧѓ 9 2.4.2ЩшМЦОпЬхВЩгУЗНАИ 10 2.5ЛњаЕЪжФЉЖЫжДааЦїЃЈЪжзІЃЉЕФНсЙЙЩшМЦ 10 2.5.1ЛњаЕЪжФЉЖЫжДааЦїЕФЩшМЦвЊЧѓ 11 2.5.2 ЛњЦїШЫМаГжЦїЕФдЫЖЏКЭЧ§ЖЏЗНЪН 12 2.5.3ЛњЦїШЫМаГжЦїЕФЕфаЭНсЙЙ 12 2.5.4ЩшМЦОпЬхВЩгУЗНАИ 13 2.6ЛњаЕЪжЕФЛњаЕДЋЖЏЛњЙЙЕФЩшМЦ 13 2.6.1ЙЄвЕЛњЦїШЫДЋЖЏЛњЙЙЩшМЦгІзЂвтЕФЮЪЬт 14 2.6.2ЙЄвЕЛњЦїШЫГЃгУЕФДЋЖЏЛњЙЙаЮЪН 15 2.6.3 ЩшМЦОпЬхВЩгУЗНАИ 18 2.7ЛњаЕЪжЧ§ЖЏЯЕЭГЕФЩшМЦ 18 2.7.1ЛњЦїШЫИїРрЧ§ЖЏЯЕЭГЕФЬиЕу 18 2.7.2ЙЄвЕЛњЦїШЫЧ§ЖЏЯЕЭГЕФбЁдёддђ 19 2.7.3ЛњЦїШЫвКбЙЧ§ЖЏЯЕЭГ 20 2.7.4ЛњЦїШЫЦјЖЏЧ§ЖЏЯЕЭГ 21 2.7.5 ЛњЦїШЫЕчЖЏЧ§ЖЏЯЕЭГ 23 2.7.6 ЩшМЦОпЬхВЩгУЗНАИ 25 2.8ЛњЦїШЫЪжБлЕФЦНКтЛњЙЙЩшМЦ 26 2.8.1 ЛњЦїШЫЦНКтЛњЙЙЕФаЮЪН 26 2.8.2 ЩшМЦОпЬхВЩгУЕФЗНАИ 26 Ек3еТ РэТлЗжЮіКЭЩшМЦМЦЫу 27 3.1вКбЙДЋЖЏЯЕЭГЩшМЦМЦЫу 27 3.1.1 ШЗЖЈвКбЙЯЕЭГЛљБОЗНАИ 27 3.1.2 ФтЖЈвКбЙжДаадЊМўдЫЖЏПижЦЛиТЗ 28 3.1.3 вКбЙдДЯЕЭГЕФЩшМЦ 28 3.1.4 ЛцжЦвКбЙЯЕЭГЭМ 29 3.1.5ШЗЖЈвКбЙЯЕЭГЕФжївЊВЮЪ§ 30 3.1.6 МЦЫуКЭбЁдёвКбЙдЊМў 35 3.1.7 вКбЙЯЕЭГадФмЕФбщЫу 37 3.2ЕчЛњбЁаЭгаЙиВЮЪ§МЦЫу 37 3.2.1 гаЙиВЮЪ§ЕФМЦЫу 37 3.2.2 ЕчЛњаЭКХЕФбЁдё 40 Ек4еТ ЛњаЕЪжПижЦЯЕЭГЕФЩшМЦ 41 4.1ЛњаЕЪжПижЦЯЕЭГгВМўЩшМЦ 41 4.1.1 ЛњаЕЪжЙЄвеЙ§ГЬгыПижЦвЊЧѓ 41 4.1.2 ЛњаЕЪжЕФзївЕСїГЬ 42 4.1.3 ЛњаЕЪжВйзїУцАхВМжУ 43 4.1.4 ПижЦЦїЕФбЁаЭ 45 4.1.5 ПижЦЯЕЭГдРэЗжЮі 45 4.1.6 PLCЭтВПНгЯпЩшМЦ 46 4.1.7 I/OЕижЗЗжХф 47 4.2ЛњаЕЪжПижЦЯЕЭГШэМўЩшМЦ 49 4.2.1ЛњаЕЪжПижЦжїГЬађСїГЬЭМ 49 4.2.2ЛњаЕЪжПижЦГЬађЩшМЦ 49 ММЪѕОМУЗжЮі 51 НсТл 52 зЈЬтВПЗж 53 ВЮПМЮФЯз 64 ИНТМ1 66 ИНТМ2 71 ИНТМ3 78 жТаЛ 94