ЙЄвЕЛњаЕШЫздЖЏННж§ЛњаЕЪжЩшМЦ(Ш§ЮЌProe)Ёю
РДдДЃК56doc.com зЪСЯБрКХЃК5D4294 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D4294
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
еЊЁЁЁЁвЊ
БОЮФМђвЊНщЩмСЫЙЄвЕЛњаЕШЫЕФИХФюЃЌННж§ЛњаЕЪжЕФзщГЩЃЌЛњаЕЪжЕФИїИіВПМўЕФећЬхГпДчЩшМЦЁЃБОЮФзХжиЖдЛњаЕЪжНјаазмЬхЗНАИЩшМЦЃЌШЗЖЈСЫЛњаЕЪжЕФзјБъаЮЪНКЭздгЩЖШЃЌШЗЖЈСЫЛњаЕЪжЕФММЪѕВЮЪ§ЁЃЭЌЪБЃЌЩшМЦСЫЛњаЕЪжЕФЪжВПНсЙЙЃЌЩшМЦСЫЛњаЕЪжЕФЪжЭѓНсЙЙЃЌМЦЫуСЫЪжЭѓзЊЖЏЪБЫљашЕФЧ§ЖЏСІОиКЭЛизЊвКбЙИзЕФЧ§ЖЏСІОиЁЃЩшМЦСЫЛњаЕЪжЕФЪжБлНсЙЙЁЃЩшМЦГіСЫЛњаЕЪжЕФвКбЙЯЕЭГЃЌЛцжЦСЫЛњаЕЪжвКбЙЯЕЭГЙЄзїдРэЭМЃЌДѓДѓЬсИпСЫЛцЭМаЇТЪКЭЭМжНжЪСПЁЃ
ЙиМќДЪЃКЙЄвЕЛњаЕШЫ ЛњаЕЪж ННж§ЛњаЕЪж
Abstract
At first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development brief. What is more, the paper accounts for the background and the primary mission of the topic. The paper introduces the function composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator. The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump. The paper designs the structure of the arm.
KeyWordsЃКindustrial robot manipulator pump air pressure drive
1.1.3 ЪжВПЩшМЦвЊЧѓ
1ЃЎЪжВПгІгазуЙЛЕФМаНєСІЁЃГ§ЙЄМўЕФжиСІЭтЃЌЛЙвЊФмВЛЪЙЙЄМўдкДЋЫЭЙ§ГЬжаЫЩЖЏЛђЭбТфЃЛ
2ЃЎМаГжЗЖЮЇвЊгыЙЄМўЯрЪЪгІЁЃЪжзІЕФПЊБеНЧЖШ(ЪжзІеХПЊЛђБеКЯЪБСНИіМЋЯоЮЛжУЫљАкЖЏЕФНЧЖШ)гІФмЪЪгІМаНєНЯДѓЕФжБОЖЗЖЮЇЃЛ
3ЃЎМаГжОЋЖШвЊИпЁЃМШвЊЧѓЙЄМўдкЪжзІФкЖЈЮЛзМШЗЃЌгжВЛМаЛЕЙЄМўБэУцЁЃвЛАуашИљОнЙЄМўЕФаЮзДбЁЧЄЯргІЕФЪжзІНсЙЙЃКШчдВжљаЮЙЄМўгІВЩгУДјvаЮВлЕФЪжзІРДЖЈЮЛЃЛЖдгкЙЄМўБэУцЙтНрЖШНЯИпЕФЃЌгІдкЪжзІЩЯЯтЭЁЂМаВМНКФОЛђЦфЫћШэжЪЕцЦЌЕШ
4ЃЎМаГжЖЏзївЊбИЫйЁЂСщЛюЃЛ
5ЃЎЪжВПНсЙЙЫЃМђЕЅНєДеЁЂИеадКУЁЂзджиЧсЁЂвзФЅЫ№ДІгІБугкИќЛЛдкЭѓВПЛђБлВПЩЯАВзАвЊЗНБуЃЌИќЛЛвЊбИЫйЁЃ
1.2ЛњаЕЪжЕФзщГЩ
ЛњаЕЪжжївЊгЩЪжВПЁЂдЫЖЏЛњЙЙКЭПижЦЯЕЭГШ§ДѓВПЗжзщГЩЁЃЪжВПЪЧгУРДзЅГжЙЄМўЃЈЛђЙЄОпЃЉЕФВПМўЃЌИљОнБЛзЅГжЮяМўЕФаЮзДЁЂГпДчЁЂжиСПЁЂВФСЯКЭзївЕвЊЧѓЖјгаЖржжНсЙЙаЮЪНЃЌШчМаГжаЭЁЂЭаГжаЭКЭЮќИНаЭЕШЁЃдЫЖЏЛњЙЙЃЌЪЙЪжВПЭъГЩИїжжзЊЖЏЃЈАкЖЏЃЉЁЂвЦЖЏЛђИДКЯдЫЖЏРДЪЕЯжЙцЖЈЕФЖЏзїЃЌИФБфБЛзЅГжЮяМўЕФЮЛжУКЭзЫЪЦЁЃдЫЖЏЛњЙЙЕФЩ§НЕЁЂЩьЫѕЁЂа§зЊЕШЖРСЂдЫЖЏЗНЪНЃЌГЦЮЊЛњаЕЪжЕФздгЩЖШ ЁЃЮЊСЫзЅШЁПеМфжаШЮвтЮЛжУКЭЗНЮЛЕФЮяЬхЃЌашга6ИіздгЩЖШЁЃздгЩЖШЪЧЛњ аЕЪжЩшМЦЕФЙи МќВЮЪ§ЁЃздгЩ ЖШдНЖрЃЌЛњаЕЪжЕФСщЛюаддНДѓЃЌЭЈгУаддНЙуЃЌЦфНсЙЙвВдНИДдгЁЃвЛАузЈгУЛњаЕЪжга2ЁЋ3ИіздгЩЖШЁЃПижЦЯЕЭГЪЧЭЈЙ§ЖдЛњаЕЪжУПИіздгЩЖШЕФЕчЛњЕФПижЦЃЌРДЭъГЩЬиЖЈЖЏзїЁЃЭЌЪБНгЪеДЋИаЦїЗДРЁЕФаХЯЂЃЌаЮГЩЮШЖЈЕФБеЛЗПижЦЁЃПижЦЯЕЭГЕФКЫаФЭЈГЃЪЧгЩЕЅЦЌЛњЛђdspЕШЮЂПижЦаОЦЌЙЙГЩЃЌЭЈЙ§ЖдЦфБрГЬЪЕЯжЫљвЊЙІФмЁЃ
ЙЄвЕЛњаЕгкЕФНсЙЙгаМђЕЅЕФвВгаИДдгЕФЁЃЕЋДгНсЙЙаЮЪНЗжЮіЃЌжївЊгажДааЛњЙЙЧ§ЖЏЯЕЭГЁЂЮЛжУМьВтзАжУКЭПижЦЯЕЭГЕШзщГЩЁЃ
змЬхММЪѕЗНАИМАЯЕЭГзщГЩ
2.1 дЪМЪ§Он
гУЭОЃКгУгкРфЪвбЙж§ЛњННж§ТСКЯН№ШмвКЁЃ
ЙцИёВЮЪ§ЃК
ННАќзюДѓШнСПЃК 8ЙЋНя
здгЩЖШЪ§ЃК 3Иі
зјБъаЮЪНЃК РрЫЦЧђзјБъ
ЪжБлдЫЖЏВЮЪ§ЃК
ЛизЊЃЈ&ЃЉЃК 110 °
ИЉбіЃЈθЃЉЃК 54°
ННАќзюДѓЧуаБНЧЃЈθ1ЃЉЃК 70°
Ч§ЖЏЗНЪНЃК вКбЙ
ПижЦЗНЪНЃК МЬЕчЦїЙЬЖЈГЬађПижЦ
ФПЁЁЁЁТМ 19000зж
еЊЁЁЁЁвЊ I
Abstract II
1аїТл 1
1.1ЛњаЕЪжЕФЗжРр 2
1.2ЛњаЕЪжЕФзщГЩ 4
1.3гІгУЛњаЕЪжЕФвтвх 6
1.4гУЛњаЕЪжЕФРњЪЗ 7
2 змЬхММЪѕЗНАИМАЯЕЭГзщГЩ 8
2.1 дЪМЪ§Он 8
2.2 ЙЄзїашвЊ 9
2.3 ЙЄзїНсЙЙ 10
2.4 ЖЏзїЗжЮі 10
2.5змЬхММЪѕЗНАИ 11
3 ЪжВПЛњЙЙЩшМЦ 12
3.1 ЪжВПЛњЙЙЩшМЦвЊЧѓ 12
3.2ЪжВПНсЙЙЗжРр 12
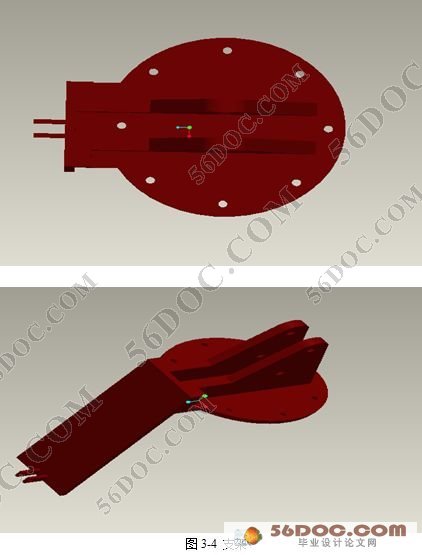
3.3здЖЏННж§ЛњаЕЪжНсЙЙЩшМЦ 14
3.4Щ§НЕвКбЙИзЕФжЇГХМмЩшМЦ 18
4 ЪжЭѓЕФНсЙЙЩшМЦ 20
4.1 ЭѓВПзмЬхЩшМЦ 20
4.2ЭѓВПЕФЩшМЦвЊЧѓ 20
4.3ЭѓВПЕФНсЙЙГпДч 21
4.4ЪжБлЧуЕЙвКбЙИзЕФЩшМЦ 24
5 ЪжБлКЭЛњЩэЕФГпДчЩшМЦМАаЃКЫ 29
5.1 БлВПКЭЛњЩэЕФМђНщ 29
5.2БлВПЩшМЦЕФЛљБОвЊЧѓ 30
5.3ЪжБлЕФГпДчЩшМЦ 30
5.4 ЪжБлЕФГпДчаЃКЫ 32
5.5 ЪжБлЩ§НЕвКбЙИзЕФЩшМЦ 33
5.6 вКбЙИзФкОЖDКЭЛюШћИЫжБОЖdЕФШЗЖЈ 35
5.7вКбЙИзБкКёКЭЭтОЖЕФМЦЫу 36
5.8ЪжБлЩ§НЕвКбЙИзЕФаЃКЫ 37
6 бќВПгыЕззљМАЛизЊвКбЙИзЕФЩшМЦ 38
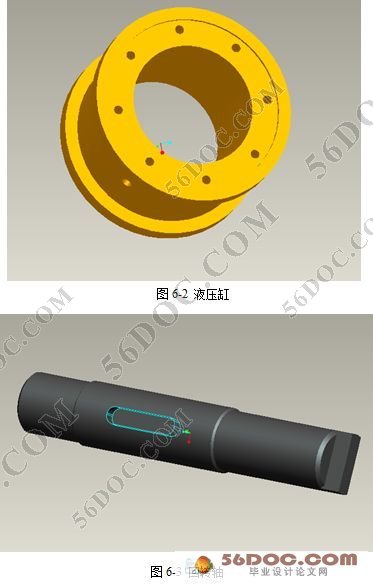
6.1 ЕззљЕФЩшМЦ 38
6.2 ЛизЊвКбЙИзЕФЩшМЦ 38
6.3 ЛизЊвКбЙИзЕФГпДчЩшМЦ 39
6.4 ЛизЊвКбЙИзЕФГпДчаЃКЫ 41
6.5 ЛизЊжсЕФЩшМЦ 42
6.6 ЩЯжсЕФЩшМЦ 43
6.7ЩЯжсзљЕФЩшМЦ 44
Нс Тл 46
ВЮПМЮФЯз 47
жТ аЛ 48
|